Radar Bilder
Vi människor gillar att klassificera saker och är faktiskt väldigt bra i det. Det är naturligt för oss. Om vi ser en björk, en gran och en tall, kan vi enkelt hänvisa till dem som träd. Om vi får höra om en annan typ av träd som vi aldrig har sett, kan vi anta de allmänna egenskaperna den har. Vanligtvis skulle vi vara ganska nära sanningen. Denna typ av klassificering av idéer och saker hjälper oss att komma ihåg, förstå och relatera olika saker. Vi kan också gruppera olika typer av sensorer i satelliterna i omloppsbanan på flera olika sätt. En är att dela dem till aktiva och passiva. Aktiva använder sin egen energikälla för att markera olika objekt. Man kan tänka sig att använda en ficklampa i mörkret för att se jämfört med att titta på samma område under dagen, med hjälp av solen, vilket är vad de passiva gör. En annan kan vara att dela dem med sensortypen de använder, optisk liknande kameror eller radarbaserad. Nedan i figur 1 kan du se hur Sentinel-1 (aktiv, radar) och Sentinel-2 satelliter (passiv, optisk) fungerar.
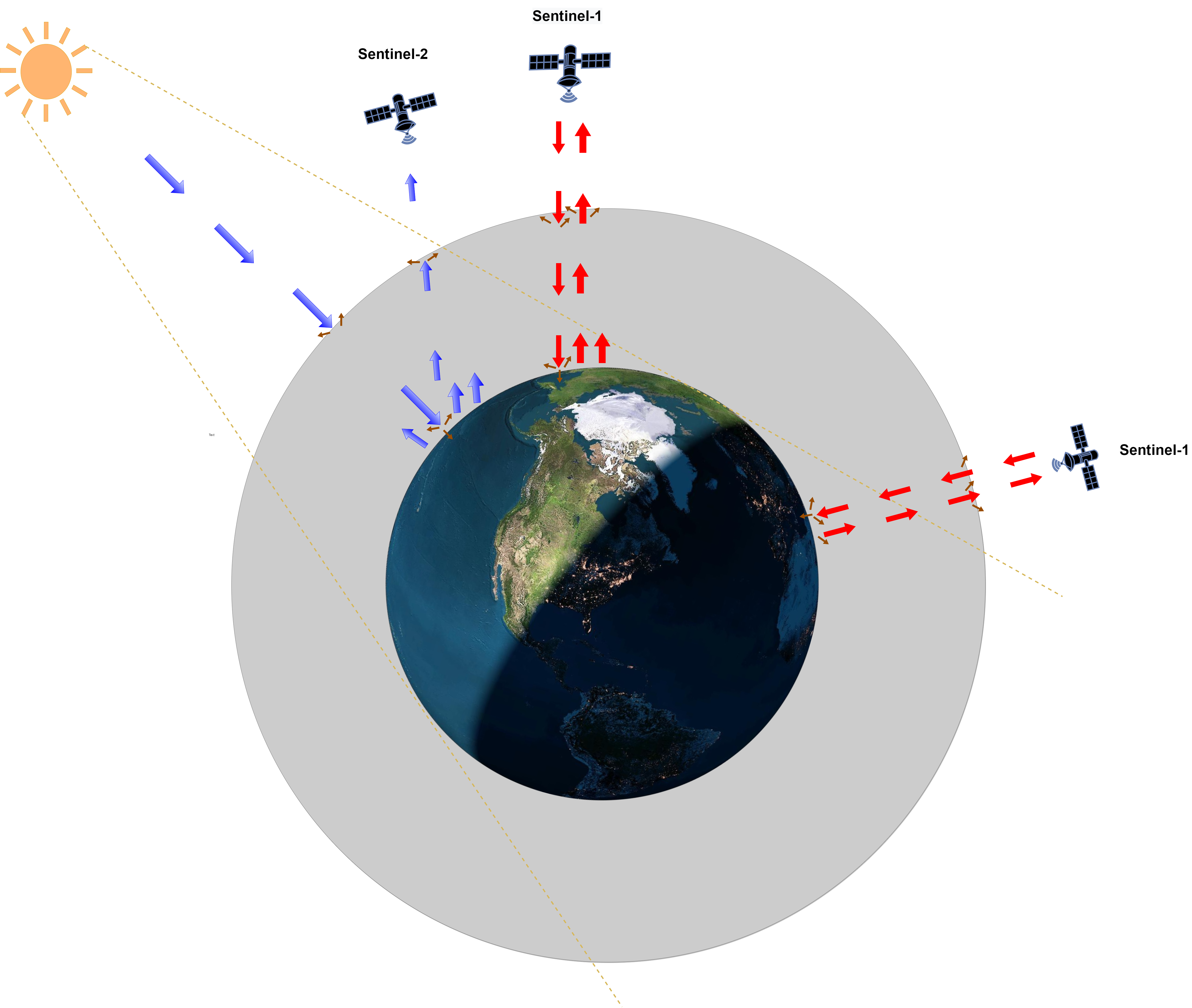
Figur 1. Exempel på satelliter Sentinel-1 och Sentinel-2 som utför observation. Sentinel-2-satelliter förlitar sig på sol och (på vissa våglängder) Jorden genererade elektromagnetisk strålning för avbildning. Sentinel-1 skickar sina egna mikrovågspulser som den använder för avbildning. Klicka för att förstora.
Radar gör inga bilder som en kamera gör. Den mäter avstånd från var radarn är placerad, till något som studsar radarstrålen tillbaka. Radarsystemet vet när det skickade pulsen och när den reflekterade pulsen kom tillbaka. Som vi vet är körhastigheten för radarpulsen ljusets hastighet. Med känd hastighet och den kända tiden pulsen tog för resan, är det då möjligt att beräkna avståndet till objektet. Det är så de traditionella radarerna fungerar i princip. Om det upprepas snabbt, mätning efter mätning, sedan baserat på hur avståndet förändras och hur mycket tid det fanns mellan dessa avståndsobservationer, är det möjligt att se hur snabbt objektet går! Ett exempel på detta i figur 2 nedan.
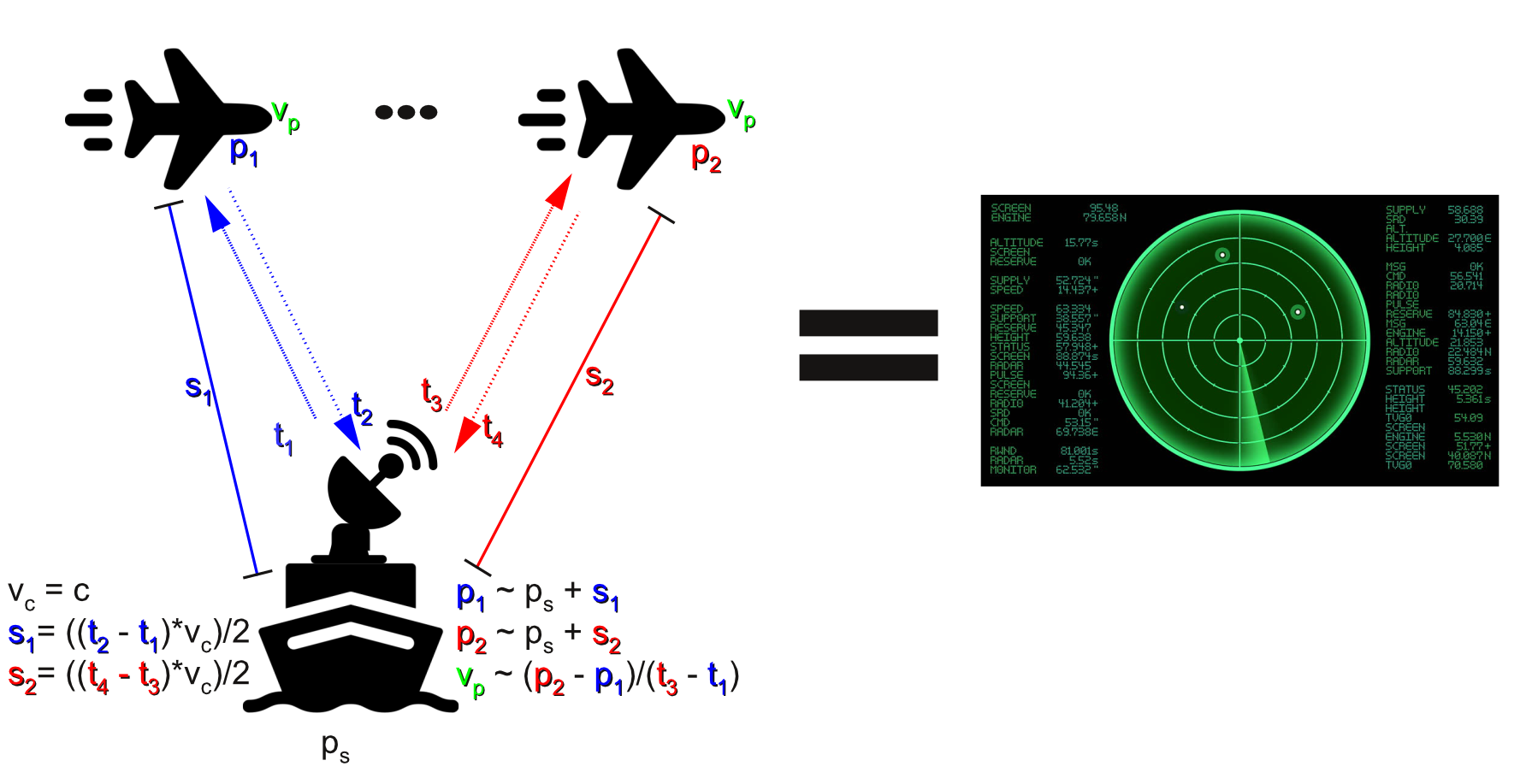
Figur 2. Illustration av de klassiska radarprinciperna, diskuterad ovan. Grön radarbild på höger Shutterstock. Ikoner Freepik. Klicka för att förstora.
Mer detaljerat är ordet ”radar” en förkortning för radiodetektering och sträckning. Det betyder helt enkelt att pulsradarn sänder är i radiofrekvenserna. Det innebär att den elektromagnetiska strålningen den sänder, ligger i frekvenserna mellan 30 Hz och 110 GHz, beroende på den avsedda användningen av radarn. Olika våglängder är lämpliga för olika ändamål. Du kan påminna dig själv om frekvenserna och våglängderna i vår tidigare artikel. Det finns olika sorters radar också. Några av dem skickar en puls som vi diskuterade, vissa mäter kontinuerligt. Vissa skickar och tar emot signalerna på olika ställen eller i olika antenner. Radar höjdmätare används för att spåra höjden, radarscatterometrar används för att göra mycket fina mätningar av hur olika saker reflekterar radarpulsen tillbaka och slutligen har vi bildradarna. Om vi vill skapa en bild med radar, något som liknar de optiska bilderna vi får från omloppsbanan, blir processen mer komplicerad. Vi kommer inte att täcka dessa detaljer i den här artikeln, bara syftar till att skapa en allmän förståelse för det. En viktig sak att komma ihåg är radarens natur. Även om resultatet ser ut som en bild av marken, är det bara en visualisering på styrkan av returnerade reflektioner på varje avstånd. Ett exempel på vissa fel i avståndsmätning finns i figur 3 nedan.
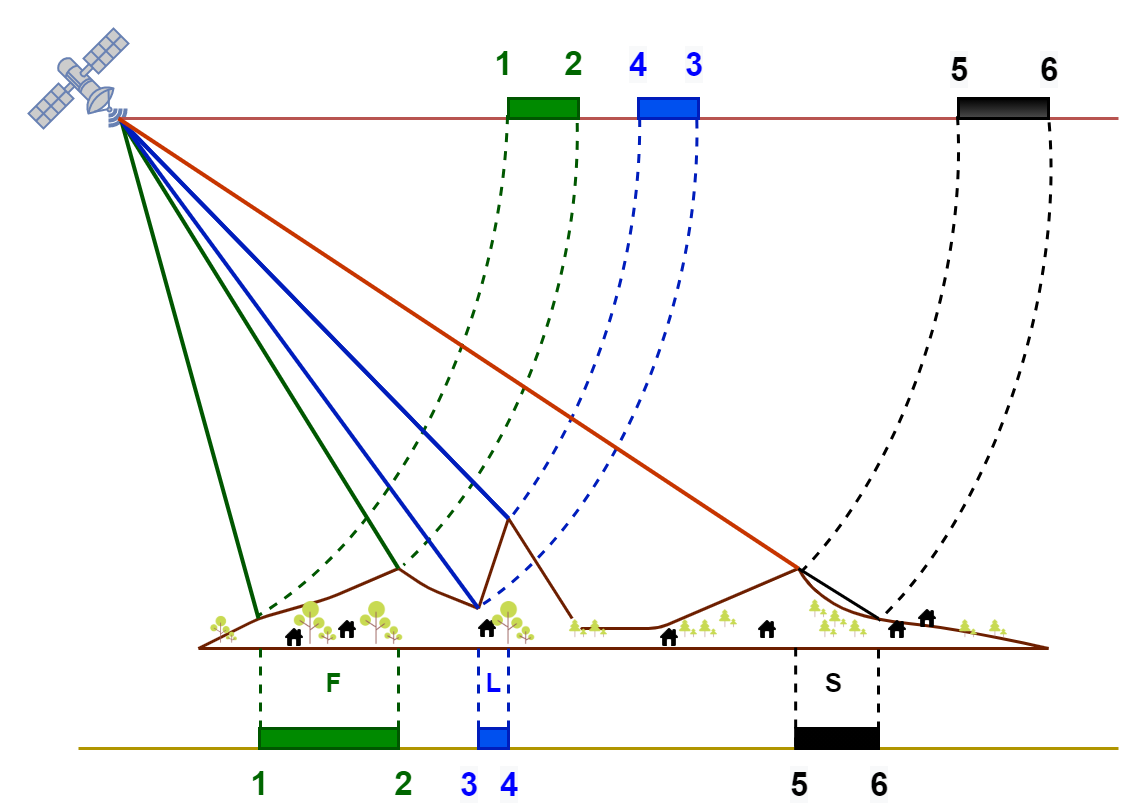
Figur 3. Avståndsmätningsfel vid radaravbildning. Diskuterad nedan. Anpassad från Luis Veci, Sentinel-1 Toolbox SAR Basics Tutorial, 2015. Klicka för att förstora.
Figur 3 illustrerar tre typiska problem när det bara mätområdet. Överst på linjen är avstånden hur radarn ser dem. På raden nedan, är avstånden hur de är i verkligheten. Mellan punkterna ett och två, färgad grön, får vi en effekt som kallas förkortning. Radarpulsen reflekterar tillbaka från punkten två snabbare än om punkten två var på så låg nivå som punkt ett. Detta leder radarn att se det gröna området som kortare i radarobservationen (Figur 3, översta raden) än det är i verkligheten (Figur 3, nedersta raden). Mellan punkterna tre och fyra får vi något som kallas ”layover ”, färgat blått. Det betyder bara att radarn ser att punkt fyra är närmare än punkt tre. Om du tittar på avståndet från punkt fyra till radarn är det mycket kortare än avståndet från punkt tre. Tyvärr avbildar det inte området korrekt. Mellan punkterna fem och sex får vi skugga. Det kan tänkas på samma sätt som de starkare skuggorna vi ser utanför. Vi ser bara svart, eftersom vi inte får någon reflexion från detta område. Vi vet inte vad som finns där inne. I radaravbildning finns det många fler felkällor. Dessa korrigeras med olika beräkningssteg och på den information vi känner till om området, till exempel höjdprofilen.
Det är så vi får en dimensionell ”bild” av området. En dimensionell bild är bara en linje med olika styrkor av reflektioner som ordnas av avståndet, som liknar linjen längst upp i figur 3. Men bilder som vi förstår dem är tvådimensionella. De har både höjd och bredd. För den andra dimensionen, när det gäller Syntetisk Aperture Radar (SAR) på en satellit, Vi tillåter bara satelliten själv att flytta. I bilden 4 kan du se detta visualiserat. Radar på satellit skickar mätpulserna, får tillbaka dem och får en dimensionell bild av området. Det fortsätter till nästa punkt på det spår, och skickar ut en annan mätpuls. Hämtar en annan endimensionell bild. Den fortsätter denna process, tills den har en förprogrammerad mängd av dessa 1D-bilder. Sedan sätter det ihop dem alla, och vi har en tvådimensionell radar ”bild”. I verkligheten är det inte så enkelt, särskilt att sätta ihop dem, men principen är så.

Figur 4. SAR på rätt spår. Den gör en mätning i taget t, rör sig och gör en andra. Bilden för ett område består av flera av dessa mätningar sammansatta. I verkligheten kan en rad pixlar bestå av flera mått. Klicka för att förstora.
Radarreflektioner ger oss information om materialets storlek och form på ett annat sätt än synligt ljus. Detta beror på att våglängden hos radarvågor är mycket längre än våglängder av synligt ljus. Och eftersom längden på våglängden hos radarvågorna kan vara mindre än, ungefär samma som eller mycket mer än de föremål de möter på marken, är den reflekterade (retur) signalen svårare att förstå. Figuren 5 nedan visar några av de enklare interaktionerna mellan radarvågor och saker på ytan. Den ”släta ytan” fungerar som en spegel och skickar den inkommande radarsignalen i en annan riktning. Radarn tar inte emot en retursignal. Sjövatten på en vindlös dag är ett bra exempel på detta. Reflektionen ”dubbel studs” kombinerar två släta ytor och retursignalen till radarn är den maximala, till exempel byggnader nära gator eller fartyg i ett våglöst vatten. I båda dessa situationer är ytobjekten mycket större än våglängderna hos den inkommande radarsignalen. För en ”grov yta” ändras ytans form på rumsliga skalor ungefär samma som radarsignalen. I denna situation sprider radarenergin i många riktningar och endast en liten retursignal mäts. Ett bra exempel är att tänka på ett fält i Pohjanmaa med många stenar av olika storlekar utspridda omkring. En mer komplicerad reflektionssituation är en skog, här består vegetationsskiktet av en volym av många ”föremål” ungefär samma storlek och mindre (bagage, lemmar och löv) jämfört med våglängden hos den inkommande radarsignalen. I denna situation mäts mycket lite retursignal av radarn. Objektets vatteninnehåll är också viktigt för att skapa en stark reflekterad signal.
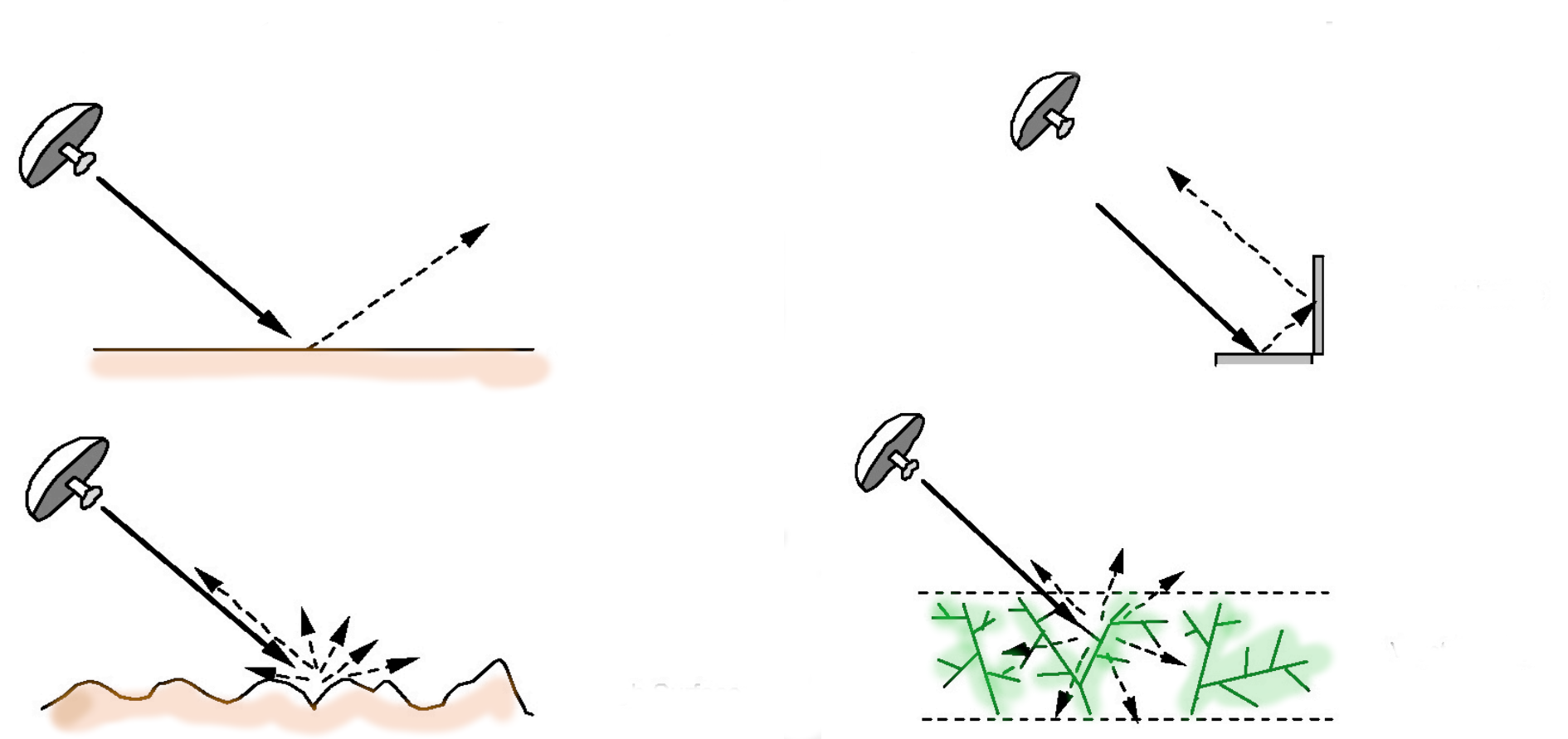
Figur 5. Olika typer av bakåtspridning. Överst till vänster: slät yta. Nedre vänster: grov yta. Överst till höger: dubbel studs. Nedre höger: vegetationslager. Bildkälla NASA Tillämpad Remote Sensing Training Program. Klicka för att förstora.
Det finns många felkällor relaterade till att använda radar från omloppsbana och stora skillnader i hur saker reflekterar radarpulsen tillbaka. Några av dessa vet vi hur man korrigerar eller hur man tolkar och vissa kan vi bara försöka mildra så bra som möjligt. Radar avbildning är också ganska komplicerad process. Vi vill fortfarande använda radarbilder i många fall. Varför? Skulle inte kameraliknande sensorer erbjuda bättre, tydligare bilder och mer begripliga resultat? Radar tillåter oss att få information i flera situationer där optiska instrument inte kommer att göra det. Mörkret påverkar till exempel inte radarn. Om du minns vår senaste artikel, fick vi väldigt lite information i bilder tagna nattetid, jämfört med bilder tagna under dagen. Men med radar är bilderna desamma, natt och dag. Vi kan också se genom molnen! Detta är ganska viktigt i grumliga områden som Finland, där vi kanske har våra senaste, inte grumliga bildmånader från det datum vi ville undersöka. Detta är också viktigt om vi gör tidsserieanalyser. Det är en analys baserad på många bilder av samma område över tiden. Med radar får vi många gånger mer användbara bilder och vi får dem i stadig takt. Slutligen, och kanske viktigast av allt, får vi ut olika slags information från radarbilderna än från de optiska, och dessa ytterligare data leder till en bättre förståelse för vår värld.